动手强化学习 第一章 强化学习简介
授课老师:张伟楠 STJU
强化学习简介
Review:两种机器学习类型
预测型
根据数据预测所需输出(有监督)
根据 预测
生成数据实例(无监督):
决策型
在动态环境中采取行动(强化学习),此处行动会引起环境中的改变
- 转变到新的状态
- 获得即时奖励
- 随着时间的推移最大化累计奖励
强化学习的定义
通过从交互中学习来实现目标的计算方法 (Learning from the interaction with environment)
智能体(agent)通过观察(observation),决策行动(action)以获得奖励(reward)。
智能体和非智能体的区别:能通过行动改变环境,不仅仅是预测
三个方面:
- 感知:在某种程度上感知环境的状态
- 行动:可以采取行动来影响状态或达到目标
- 目标:随着时间推移最大化累积奖励
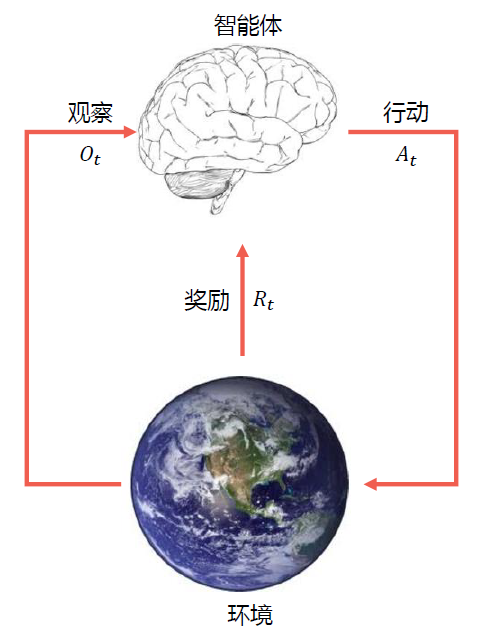
强化学习交互过程
在每一步 ,
- 智能体:获得观察 ,获得上一轮到这一轮的奖励 ,执行行动
- 环境:获得行动 ,给出观察 ,给出奖励
- 在环境这一步增加为
强化学习系统要素
历史
观察、行动和奖励的序列:
- 即一直到时间 为止的所有可观测变量
- 根据这个历史可以决定接下来会发生什么
- 智能体选择行动
- 环境选择观察和奖励
状态(state)
是一种用于确定接下来会发生的事情(action、observation、award)的信息
状态时关于历史的函数
策略(policy)
智能体在特定时间的行为方式
- 是从状态到行动的映射
- 确定性策略(Deterministic Policy):
- 随机策略(Stochastic Policy):,是一个条件分布
奖励(Reward)
- 一个定义强化学习目标的标量
- 能立即感知到什么是“好”的
价值函数(Value Function)
用于评估给定策略下状态的好坏
状态价值是一个标量,用于定义对长期来说什么是“好”的
价值函数是对于未来累计奖励的预测
用于评估在给定策略下,状态的好坏
,其中
环境的模型(Model)
用于模拟环境的行为
预测下一个状态
预测下一个(立即)奖励
以迷宫为例
状态:智能体的为止
行动:N E S W
状态转移:根据行动方向朝下一格移动(如果行动方向是墙则不动)
奖励:每一步为 -1
给定一个确定性策略,根据策略可以反推各个状态下的价值函数
强化学习智能体分类
根据是否已知(环境)模型两类
基于模型的强化学习(model-based)
- 策略(和/或)价值函数
- 环境模型已知
- 比如:迷宫游戏、围棋等
模型无关的强化学习(model-free)
更接近真实情况,真正和环境进行交互(更难、更加 data-hungry)
- 策略(和/或)价值函数
- 没有环境模型
- 比如:Atari 游戏的通用策略:
- 游戏规则未知
- 从交互游戏中学习
- 在操纵杆上选择行动并查看分数和像素画面
基于价值还是基于策略?
基于价值:没有策略(隐含)、有价值函数
基于策略:有策略、没有价值函数
Actor-Critic:有策略、也有价值函数
探索与利用
探索与利用
序列决策任务中的一个基本问题
基于目前策略获取已知最优收益还是尝试不同的决策
- exploitation (利用)执行能够获得已知最优收益的决策
- exploration(探索)尝试更多可能的决策,不一定会是最优收益
当前策略不一定是最优策略,通过探索与利用,更新当前策略,以接近最优策略。
根据 探索
,其中,
探索:可能发现更好策略
策略探索的一些原则
朴素方法(Naive Exploration):添加策略噪声
积极初始化(Optimistic Initialization)
基于不确定性的度量(Uncertainty Measurement)
- 尝试具有不确定收益的策略,可能带来更高的收益
概率匹配(Probability Matching)
- 基于概率选择最佳策略
状态搜索(State Searching)
- 探索后续状态可能带来更高收益的策略
多臂老虎机(multi-arm bandit)
形式化描述
动作集合:
收益(反馈)函数分布:
最大化累积时间的收益:
收益估计
期望收益和采样次数的关系
缺点:每次更新的空间复杂度是
改进:增量实现
误差项:
空间复杂度为
算法:多臂老虎机
- 初始化:
- 主循环
- 利用策略 选取某个动作
- 获取收益:
- 更新计数器:
- 更新估值:
应当选取什么样的策略 ?
Regret 函数
- 决策的期望收益:
- 最优收益:
Regret
- 决策与最优决策的收益差:
- Total Regret 函数:
等价性
必须要一直探索吗?
如果一直探索新策略:,total regret 将线性递增,无法收敛
如果一直不探索新策略:,total regret 将线性递增
是否存在一个方法具有次线性 (sublinear) 收敛保证的 regret?
下界(Lai & Robbins)
使用 和反馈函数分布相似性: 描述。
贪心策略和 ε-greedy 策略
贪心策略是线性增长的 Total regret
ε-greedy 策略
- 以 1-ε 概率去采样 argmax Q(a),以 ε 概率做 uniform 的探索
- 常量 ε 保证 total regret 满足
- total regret 仍然是线性递增的,知识增长率比贪心策略小
衰减贪心策略
- ε-greedy 策略的变种,ε 随着时间衰减
- 理论上对数渐进收敛
- 但是很难找到合适的衰减规划
积极初始化
- 给 一个较高的初始化值
- 增量式蒙特卡洛估计更新
- 有偏估计,但是随着采样增加,偏差带来的影响会越来越小
- 仍然可能陷入局部最优
显式考虑动作的价值分布
- 显示鼓励不确定性
- 直接根据分布采样来选择
基于不确定性测度
不确定性越大的 ,越具有探索价值,越有可能是最好的策略
一个经验性的指导:
- N(a) 大,U(a) 小
- N(a) 小,U(a) 大
- 策略 :
也成为 UCB:上置信界法 upper confidence bounds
(数学证明略,听不懂)
Thompson Sampling 方法
根据每个动作成为最优的概率来选择动作
(公式一大坨,看不懂)
实现:根据当前每个动作的价值概率分布来采样到其价值,选择价值最大的动作
总结
- 探索与利用是强化学习中 trail-and-error 中的必备技术
- 多臂老虎机可以被看成是无状态强化学习
- 躲避老虎机是研究探索和利用技术理论的最佳环境
- ε-greedy、UCB 和 Thompson Sampling 方法在多臂老虎机任务中十分常用,在强化学习探索中也十分常用,最常见的是 ε-greedy