动手强化学习 第六章 规划与学习
learning by planing
入门算法与介绍
模型是什么
给定一个状态和动作,模型能够预测下一个状态和奖励的分布,即
- s, a:给定的状态和动作
- s’, r:下一个状态和奖励
模型的分类:分布模型(distribution model,类似于白盒模型)、样本模型(sample model,黑盒模型)
以掷骰子为例:分布模型指的是得到骰子数字总和的所有可能性及其概率;样本模型之采样得到一种骰子的数字综合
模型的作用:得到模拟的经验数据(simulated experiences)
规划是什么
规划 planning
输入一个模型,输出一个策略的搜索过程
- 状态空间的规划 state-space planning
- 规划空间的规划 plan-space planning
规划的通用框架
模型→模拟经验→值函数→策略
规划的好处
- 任何时间点都可以被打断或重定向
- 复杂问题下进行小而增量式的时间步规划是很有效的
规划和学习
不同点:规划用模型产生的模拟经验;学习用环境产生的真实经验
相同点:通过回溯更新值函数估计;学习的方法可以用在模拟经验上
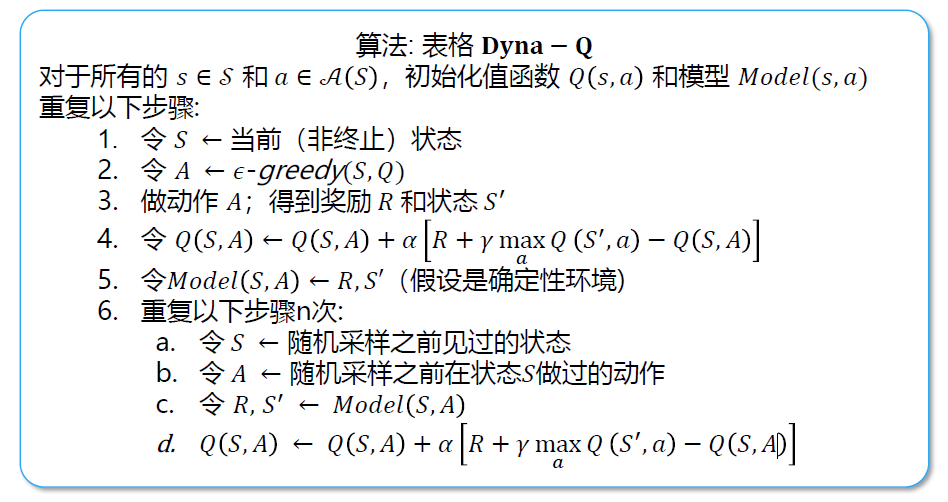
Dyna 算法
集成规划、决策和学习的算法
- 更新模型
- 模型学习或间接强化学习
- 对经验数据的需求少
- 更新值函数和策略
- 直接强化学习
- 简单不受模型偏差的影响
Dyna 算法框架
- 和环境交互产生真实经验
- 直接强化学习更新函数策略
- 使用真实经验更新模型
- 基于模型随机采样得到模拟经验
- 使用模拟经验做规划更新值函数和策略
对于比较简单的环境,进行 planing 后模型能收敛更快。
模型不准了怎么办?
- 环境是随机的,并且之观察了有限的样本
- 模型使用了泛化性不好的函数估计
- 环境改变了,并且还没有被算法检测到
采样方法
优先级采样
常见的采样方法:均匀随机采样;模拟的经验和更新应集中在一些特殊的状态动作
更好的采样方法:
- 后向聚焦 backward focusing:很多状态的值发生变化带动前继状态的值发生变化
- 有的值改变多,有的改变少
优先级采样
设置优先级更新队列
根据值改变的幅度定义优先级 𝑃 ← |𝑅 + 𝛾\max_𝑎𝑄(S′,a)−𝑄(𝑆,𝐴)|
局限性及改进
随机环境种利用期望更新的方法,会可能浪费很多计算资源在一些低概率的状态转移上
改进:引入采样更新
期望更新和采样更新
值函数
动作值函数
期望更新
- 需要分布模型
- 需要更大的计算量
- 没有偏差更准确
采样更新
- 只需要采样模型
- 计算量需求更低
- 受到采样误差(sampling error)的影响
不同分支因子下的表现
假设
- b 个后续状态等可能
- 初始估计误差为 1
- 下一个状态值假设估计正确
结果
- 分支因子越多,采样更新越接近期望更新
- 大的随机分支银子和状态数量较多的情况下,采样更新更好
所以环境越复杂越应该用采样更新而不是期望更新
轨迹采样
对比动态规划:对整个状态空间进行遍历,没有侧装实际需要关注的状态上
在状态空间种按照特定分布采样:根据当下策略所关测的分布进行采样
轨迹采样的状态转移和奖励由模型决定;动作由当前的策略决定
轨迹采样的优缺点
优点
- 不需要指导当前策略下状态的分布
- 计算量少,简单有效
缺点
- 不断重复更新已经被访问的状态
决策时规划
实时动态规划
和传统动态规划的区别
- 实时的轨迹采样
- 只更新轨迹访问的状态值
优势
- 跳过策略无关的状态
- 解决状态集合规模大的问题上具有优势
- 满足一定条件下可以以概率 1 收敛到最优策略
决策时规划
背景规划 background planning
- 规划是为了更新很多状态值供后续动作的选择
决策时规划 decision-time planning
- 只着眼于当前状态的动作选择
- 在不需要快速反应的应用种很有效,比如棋类游戏
启发式搜索
- 访问当前状态,对后续可能的情况进行树结构展开
- 叶节点代表估计的值函数
- 回溯到当前状态,方式类似于值函数的更新方式
启发式搜索就可以使用决策时规划
贪婪策略在单步情况下的扩栈
搜索越深,计算量越大,得到的动作越接近最有
性能提升不是源于多步更新,而是源于专注当前状态的后续可能
Rollout 算法
- 从当前状态进行模拟的蒙特卡洛估计
- 选取最高估计值的动作
- 在下一个状态重复上述步骤
特点
- 决策时规划,从当前状态进行 rollout
- 直接目的类似于策略迭代和改进,寻找更优的策略
- 表现取决于蒙特卡洛方法估值的准确性
Rollout 算法的加速方法
- 多处理器进行并行采样
- 轨迹截断,用存储的值估计代替回报
- 剔除不可能称为最佳动作的动作(剪枝)
蒙特卡洛树搜索
选择、扩展、模拟、回溯