
法语学习 A1 Unité 0 Phonétique
开始学习时间:2024 年 1 月 2 日 法语字母 法国国旗: 蓝 bleu - liberté 白 blanc - égalité 红 rouge - fraternité 法国国歌:La Marseillaise Paris 巴黎 Lyon 里昂 Marseille 马赛 法语字母表 A “啊” /a/ Allô 喂 B “波诶” /be/ bébé 宝宝 C “斯诶” /se/ Céline D “得诶” /de/ dé 骰子 E “呃” /ə/ leçon 课程 F “诶夫” /εf/ France 法国 G “日诶” /ʒe/ géographie 地理 H “阿使” /aʃ/ hôtel 酒店 I /i/ image 图像 J “日衣” /ʒi/ journal 报纸 K “嘎啊(清辅音浊化)” /ka/ kaki 柿子 L “诶了” /εl/ lune 月亮 M “诶么” /εm/ Maman 妈妈 N “诶呢” /εn/ non 不 O “欧” /o/ Oh là là! 我的天哪! P “呗(清辅音浊化)” /pe/ papa 爸爸 Q “哥迂(清辅音浊化)” ...

德语学习 B2 Kapitel 3 Arbeit ist das halbe Leben?
Inhalt Modul 1: Mein Weg zum Job Modul 2: Glücklich im Job? Modul 3: Teamgeist Modul 4: Werben Sie für sich! 3-1 Arbeit ist das halbe Leben (1) Make-up-Pinsel 化妆刷 der Pinsel-s 毛笔,画笔;刷子 der Maskenbildner 化妆师 die Parfümeur-en 香水师 Handhaltung 手势 Fingerhaltung 手指姿势 Klavierspieler/Pianist 钢琴家 das Kissen 枕头;软垫 Möbelverkäuferin 家具售货员 Laptop 笔记本电脑 Schriftsteller 作家 Blogger 博主 der Nervenkitzel-/ 神经刺激 die Stuntschule-n 特技表演学校 der Stuntman-men 替身男演员 abwechslungsreich 变化多端的,多样的,多元化的 der Zeitvertreib-/ 消 ...

算法博弈论 三篇不同方向的论文阅读
Iannis 给了三篇论文,三个方向。分别通读一下这三篇论文,看看什么主题比较感兴趣吧。 Possible Project Topics of Algorithmic Game Theory Algorithmic Game Theory Mechanism Design ✅ Auction Theory Market Design … The first paper is about Mechanism Design for Machine Learning/Statistical Tasks. 简单来讲就是说,将提供训练集的个体视为智能体 Agent,在训练人工智能模型的时候,这些智能体有动机操纵提供的训练集数据来使得人工智能模型最终的输出有利于该智能体。而研究者的任务是研究如何设计一个机制来鼓励智能体提供真实的数据(no incentive to misreport) Mean Estimation (2016 ICML) Classification Regression (Current) Games and Price of Anarchy Price ...
计算几何 W48 Robot Motion Planning and Visibility (新课完结)
Robot Motion Planning Given a set of obstacles P1,⋯ ,PkP_1,\cdots,P_kP1,⋯,Pk, and a polygonal robot RRR with starting configuration sss and target configuration ttt. Find a path for the robot from sss to ttt if possible. 机器人路径规划问题,首先应该先解决:存不存在这样一条路径的问题。 Reference point define a reference point ppp of the robot and define position of the vertices of RRR w.r.t. ppp. Suppose our robot can move by translating R(x,y)R(x,y)R(x,y): position of the robot when the reference point is at (x,y)(x,y)(x,y ...
算法博弈论 W48 Potential games and price of stability (新课完结)
Cut games Graph G=(V,E)G=(V,E)G=(V,E) with weight wew_ewe on each edge e∈Ee\in Ee∈E. Every node corresponds to a player. Two strategies per player/node vvv: To put vvv at the left or right side of the cut Cut(S)Cut(S)Cut(S): the set of edges with their endpoints on different sides of the cut at a state SSS payoffi(S)=∑e∈Cut(S)∩Niwe\text{payoff}_i(S)=\sum_{e\in Cut(S)\cap N_i}w_e payoffi(S)=e∈Cut(S)∩Ni∑we A pure Nash equilibrium was found. 带权图的最大割 Maximum cut Cut games are potential game ...

计算机视觉 W48 Roundup - Uncovered Areas (新课完结)
Cross-entropy revisited Binary cross-entropy loss J(w)=−∑i=1n(y(i)log(hw(x(i)))+(1−y(i))log(1−hw(x(i))))=−∑i=1n∑k=011{y(i)=k}log(Pr(y(i)=k∣x(i)))J(w)=-\sum_{i=1}^n(y^{(i)}\log(h_w(x^{(i)}))+(1-y^{(i)})\log(1-h_w(x^{(i)})))\\ =-\sum_{i=1}^n\sum_{k=0}^1\mathbf 1\{y^{(i)}=k\}\log(\Pr(y^{(i)}=k|x^{(i)})) J(w)=−i=1∑n(y(i)log(hw(x(i)))+(1−y(i))log(1−hw(x(i))))=−i=1∑nk=0∑11{y(i)=k}log(Pr(y(i)=k∣x(i))) categorical cross entropy loss is used for multi-class classification. similar Where does lo ...
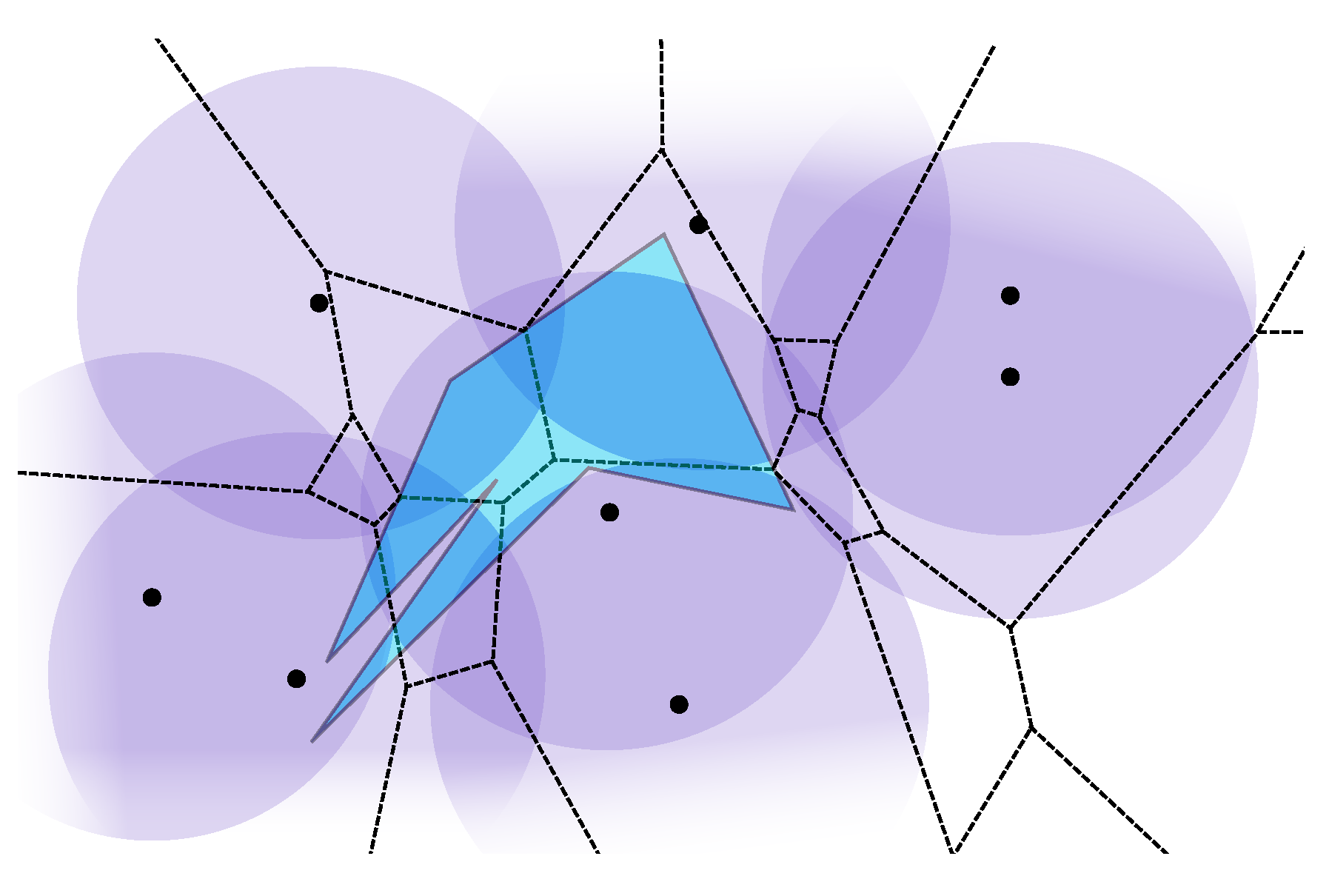
计算几何 W47 Voronoi Diagrams and 3D Convex Hull
Voronoi Diagrams nnn points p1,⋯ ,pnp_1,\cdots,p_np1,⋯,pn. Nearest neighbor problem 举一个具象化的例子: nnn post offices Find the closest post office For which region, point pip_ipi is the closest point? What is the region that pip_ipi servies? (对于二维空间使用欧几里得距离定义的距离)两个最近点对连线线段的中垂线就是分界。 Definition of Voronoi Diagrams A set PPP of nnn points p1,⋯ ,pnp_1,\cdots,p_np1,⋯,pn decomposition of R2\mathbb R^2R2 into regions R1,⋯ ,RnR_1,\cdots,R_nR1,⋯,Rn. for any q∈Riq\in R_iq∈Ri, pip_ipi is the closes ...
算法博弈论 W47 Congestion games, potential functions
Atomic selfish routing 3 players: strategies: connect source sis_isi with destination tit_iti. Assuming that all edges have latency functions ce(x)=xc_e(x)=xce(x)=x how do the players act? 肯定尽量选不挤的路径。 Load balancing games Every player has a job and wants to assign it to some machine so that its completion time is minimized mmm parallel machines Machine jjj has speed σj\sigma_jσj If machine jjj gets xxx jobs, the latency/cost experienced by each of the players/owners of these jobs is xσj ...
计算机视觉 W47 Sequence models (natural language processing)
Sequence Models sequence models are the machine learning models that input or output sequences of data sequential data includes text streams, audio clips, video clips, time-series data etc. NLP technology to handle human language using computers aid human-human communication and/or human-machine communication analyze/understand text (syntactic analysis, text classification, named entity recognition, building knowledge graphs). Language model ≈ next word prediction P(X=sentence)=∏i=1tP(xi∣x1 ...
计算几何 W46 More Orthogonal problems
Kd-Trees Problem set given a set PPP of nnn points in R2\mathbb R^2R2 store PPP in a data structure s.t. given a query rectangle RRR, we can find the points in RRR efficiently. idea generalize BST to R2\mathbb R^2R2 every node vvv corresponds to a rectangular region SvS_vSv; the points in the subtree of vvv lie in SvS_vSv. Build Kd-Tree BuildKDTree(P,dP,dP,d) if P={p}P=\{p\}P={p} then return a leaf node representing ppp. if ddd is even then partition PPP into P1,P2P_1,P_2P1,P2 usin ...

